DeepMind的新人工智能可以在没有特定训练的情况下控制机器人任务
DeepMind的新人工智能可以控制机器人任务
Google DeepMind推出了一种新的AI模型,可以指导从未训练过的机器人任务。
该模型名为RT-2,它从网络和机器人数据中学习,并将这些信息转化为机器的简单指令。
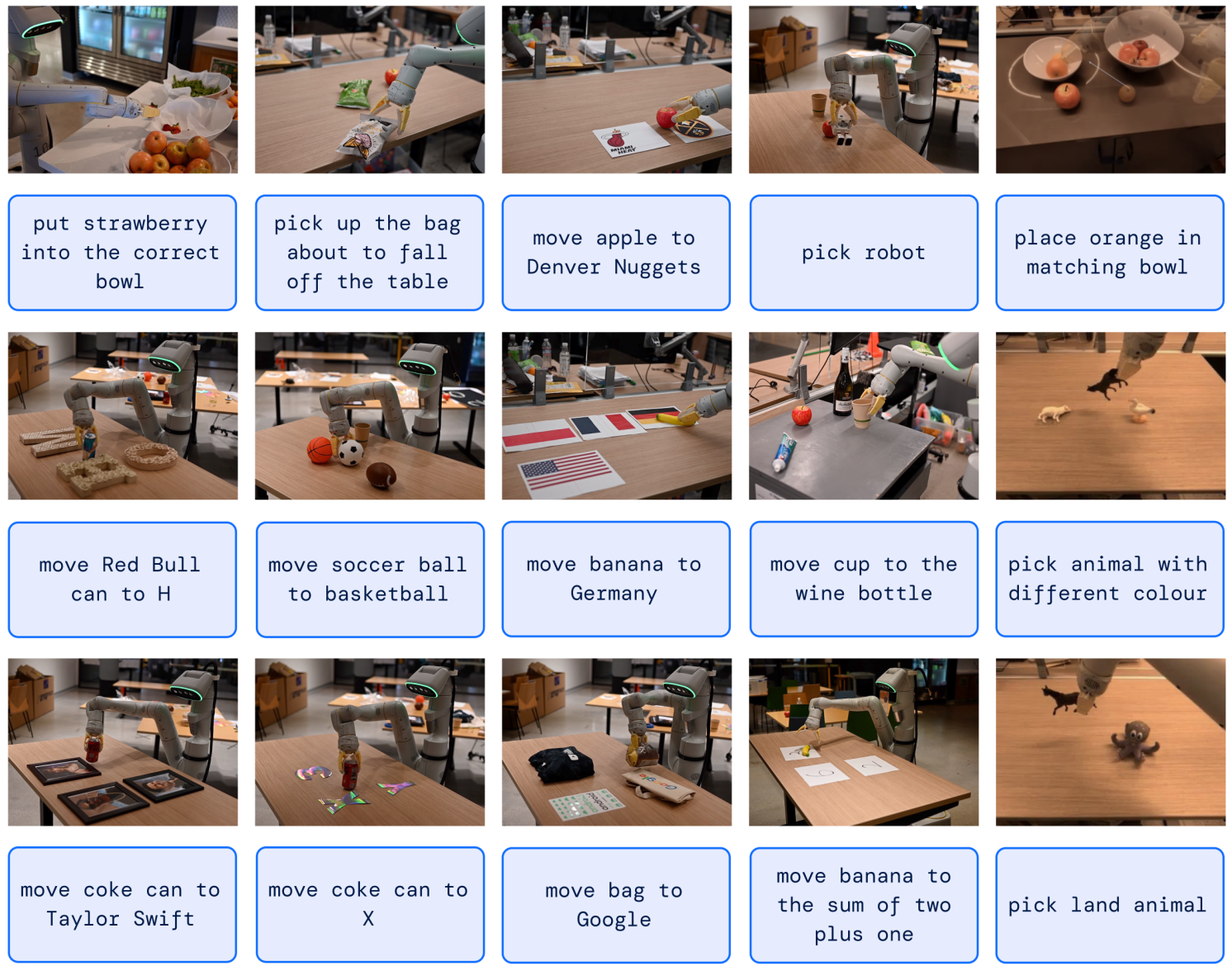
在测试中,该模型被要求执行机器人数据中从未见过的动作,例如将橙子放入匹配的碗中。为了遵循这些指令,系统需要将来自基于网络的数据的知识进行翻译。根据DeepMind的说法,该模型在这些操作中成功率达到62%,是其前身RT-1的两倍。
DeepMind的机器人主管Vincent Vanhoucke说:“就像语言模型通过从网络中学习文本来了解一般的思想和概念一样,RT-2通过从网络数据中获取知识来指导机器人行为。换句话说,RT-2能够与机器人交流。”
测试表明,RT-2具有令人印象深刻的泛化能力。它还对以前未曾遇到的机器人数据具有改进的语义和视觉理解能力。
值得注意的是,该模型可以使用基础推理来遵循新的用户命令。令人印象深刻的是,它甚至可以进行多阶段的语义推理。例如,当被指示选择一个可以用作锤子的物体时,RT-2正确地选择了一块石头。

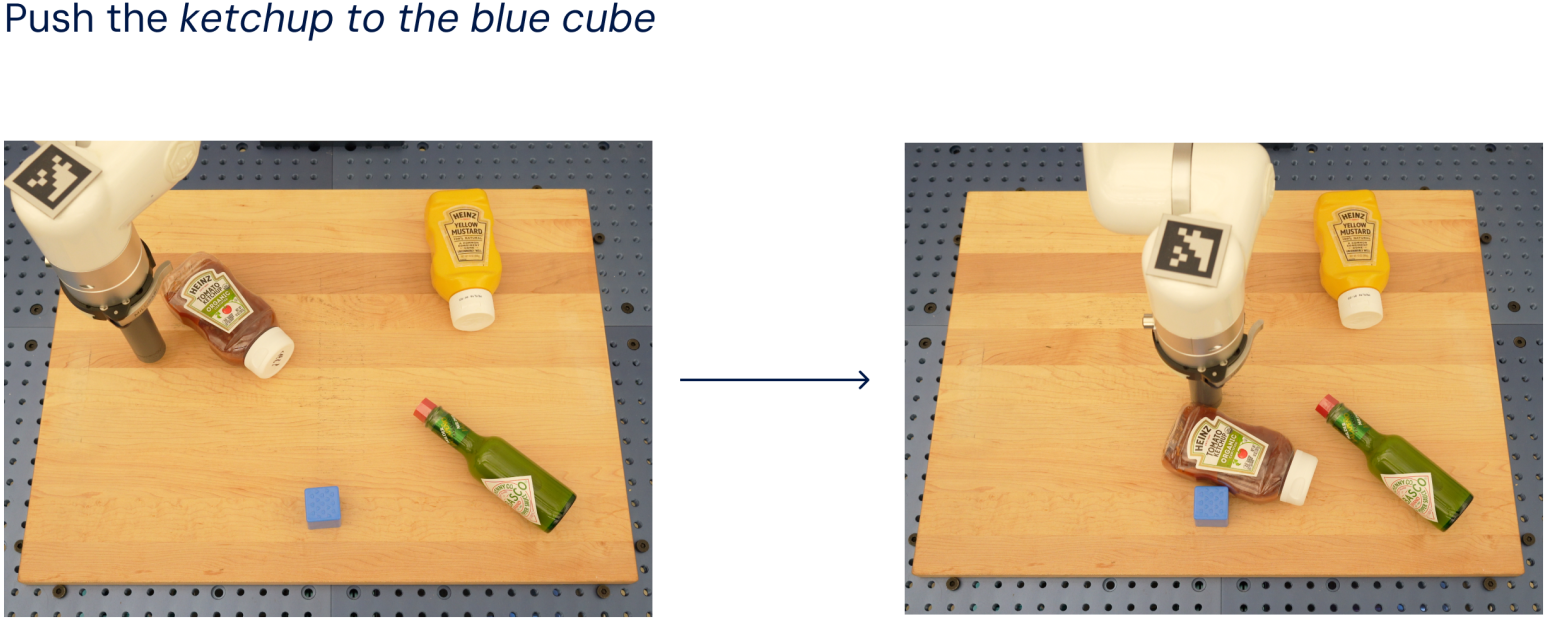
在另一个评估中,该模型被命令将一瓶番茄酱推向一个蓝色的立方体。
场景中有几个物体,但训练数据集中只有立方体。尽管如此,RT-2成功地将番茄酱推向指定的目的地。
DeepMind将RT-2视为人工智能领域的重大突破。这家伦敦实验室表示,该模型使我们更接近一个有用的机器人的未来。
Vanhoucke说:“RT-2不仅展示了人工智能在机器人领域的快速发展,还为更通用的机器人提供了巨大的潜力。虽然在人类中心的环境中实现有用的机器人仍然需要大量的工作,但RT-2向我们展示了一个令人兴奋的机器人未来就在眼前。”
您可以在此处阅读RT-2的研究论文。






